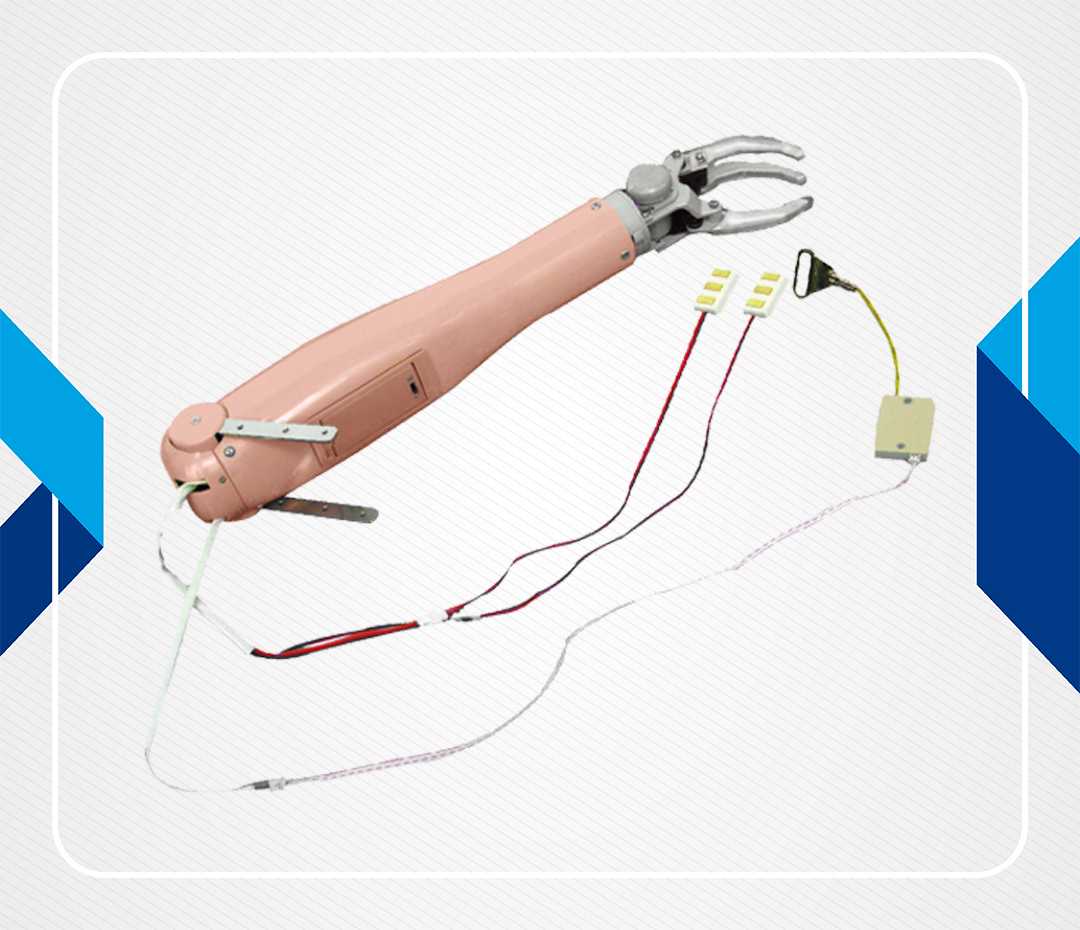
JB-HKSK电动拉线控制肘关节混合假肢
前臂一自由度开关控制手指动作
腕关节被动旋转,且任意位置自锁
索控开关控制肘关节伸屈,且任意位置自锁
W=1.05kg
可提供3个手指或5个手指
Optional for 3 or 5 fingers
前臂一自由度开关控制手指动作
腕关节被动旋转,且任意位置自锁
索控开关控制肘关节伸屈,且任意位置自锁
如需要可改为内置电池
可采用新一代B型手头配置
肘离断不带上旋,上臂残肢较短可带上旋,上臂可被动旋转
适用于上臂中、短、长残肢

JB-SDS21上臂多模式控制假肢

JB-SDS22 上臂多模式控制假肢(带被动上旋)

JB-SDS31上臂多模式控制假肢

JB-SDS32上臂多模式控制假肢(带被动上旋)